Какой контроллер выбрать для солнечной батареи: объясняем суть
Содержание:
- Выбор ПЛК
- Какими бывают логические контроллеры: виды
- Основные возможности
- Память
- Подбор контроллера по максимальной нагрузке, зарядному току акб и по количеству акб
- Применение
- Принцип работы ПЛК
- Технические характеристики
- Виды контроллеров
- Логика управления
- Подключение элементов к ПЛК
- Входы и выходы контроллера для подключения устройств
- Кулачковые контроллеры
- Возможно, вам также будет интересно
- Конструкция рукоятей
- Определение
- Типы контроллеров
- СЕТЕВЫЕ КОНТРОЛЛЕРЫ СКУД
Выбор ПЛК
Выбор платформы автоматизации
Выбор платформы определяет и весь ваш будущий выбор.
ПЛК является первым пунктом в выборе платформы.
Правильный выбор платформы позволяет минимизировать расходы жизненного цикла системы управления:
- склад запасных частей и сервисное обслуживание
- обучение и сертификацию обслуживающего персонала
- приобретение лицензий на средства разработки прикладного ПО
- интеграцию (бесшовная интеграция)
- миграцию (переход со старого оборудования на новое)
- программы и сикдки для ключевых клиентов
Определение количества точек ввода-вывода
Желательно максимально точно определить общее количество точек ввода-вывода (с учётом резервирования), чтобы подобрать ПЛК соответствующей производительности,
или заранее предусмотреть модель контроллера с большим запасом по расширяемости.
- Дискретные входы (стандартные и быстродействующие импульсные)
- Аналоговые входы для подключения датчиков:
- токовых (0..20мА, 4..20мА)
- «напряженческих» (-10..+10В, 0..+10В)
- термопар и термосопротивлений (способ подключения: 2-х, 3-х или 4-х проводное подключение)
- Дискретные выходы (мокрый контакт)
- Релейные выходы (сухой контакт):
- тип нагрузки (резистивная, индуктивная, резистивно-индуктивная)
- величина тока (в Амперах)
- напряжение (~220В, =24В)
- Аналоговые выходы:
- токовые (0..20мА, 4..20мА)
- «напряженческие» (-10..+10В, 0..+10В)
- Интерфейсы для подключения угловых или линейных датчиков скорости, положения (энкодеров, резольверов, синусно-косинусных)
Определение архитектуры системы управления
- Составить список объектов автоматизации (производственных площадок, цехов, участков, технологических линий, подсистем)
- Определиться с количеством ПЛК: если объекты управляются независимо друг от друга и вводятся в эскплуатацию поочередно, то можно предусмотреть для них
отдельные контроллеры - В зависимости от объёма и скорости обмена данными, территориального расположения объектов управления необходимо выбрать тип и топологию промышленной сети,
требуемое коммуникационное оборудование - Для минимизации длины кабельных соединений используются станции распределённого ввода-вывода
- Расписать точки ввода вывода по контроллерам, шкафам локального и децентрализованного ввода-вывода, определить количество и типы модулей ввода-вывода с
учётом запаса по свободным каналам ввода-вывода - В зависимости от направления обмена данными между ПЛК необходимо правильно выбрать конфигурацию Master – Slave (Ведущий – Ведомый): контроллеры типа Slave
не могут обмениваться данными друг с другом
Масштабируемость
Масштабируемость – это возможность подобрать промышленный контроллер оптимальной конфигурации под конкретную задачу (не переплачивая за избыточную функциональность),
а при необходимости расширения – просто добавить недостающие модули без замены старых.
Выбор блоков питания
Контроллеры подключаются к стабилизированным импульсным источникам питания. Необходимо аккуратно подсчитать суммарный ток, потребляемый всеми модулями
контроллера и подобрать блок питания с соответствующей нагрузочной способностью.
Пример последствий неправильного выбора блока питания
Выходные модули установки приготовления клея для варки целлюлозы иногда отключались и испорченный клей приходилось выбрасывать тоннами.
К финскому проекту ни у кого претензий не возникало. Заменили все модули ввода-вывода — не помогло. Грешили на случайные помехи из-за плохого заземления.
Оказалось, что в определённых ситуациях (как-бы случайно) срабатывало такое «большое» количество входов и выходов,
что суммарный потребляемый ими ток на мгновение превышал допустимый выходной ток блока питания и модули вывода отключались.
Заменили блок питания на более мощный и проблема была решена.
- Очень полезен программный симулятор, с помощью которого можно отладить программу без подключения к ПЛК
- Удобно, если для программирования ПЛК можно использовать стандартный ноутбук и стандартный кабель (USB или Ethernet)
- Проще найти программиста, если контроллер поддерживает стандартные языки программирования IEC61131:
- LD (Ladder Diagram) – графический язык релейной логики
- IL (Instruction List) – список инструкций
- FBD (Function Block Diagram) – графический язык диаграмм логических блоков
- SFC (Sequential Function Chart) – графический язык диаграмм состояний
- ST (Structured Text) – текстовый язык программирования высокого уровня
Какими бывают логические контроллеры: виды
По своим характеристикам данные устройства могут разделяться на несколько категорий и групп. По способу управления они бывают:
- централизованными. Все приборы, отвечающие за ввод и вывод данных находятся в одном месте;
- распределительными. В этом случае входные и выходные модули находятся в разных местах. Ввод и вывод данных производятся через различные каналы.
По типам входов контроллеры делятся на:
- дискретные. Такие приборы способны обрабатывать за раз только один сигнал;
- аналоговые. Контроллеры принимают только один, определённый вид сигналов;
- специальные. Необходимы для постоянного, непрерывного подсчёта импульсов.
Также устройства делятся на несколько категорий:
- модульные. Состоят из нескольких модулей, которые обрабатывают определённые данные;
- моноблочные. В контроллеры заранее определено количество вводов и выводов. Конструкция не может изменяться;
- распределительные. В таких устройствах модули находятся отдалённо друг от друга – распределяются по всему контроллеру.
Основные возможности
- Непрерывный анализ логического состояния 32-х входов, формирование событий, сообщений о них и их передачу по внутренней локальной шине всем подключенным к ней устройствам.
- Выдачу дискретных сигналов управления по 32 выходам для коммутации электрических нагрузок инженерного оборудования.
- Запоминание логического состояния выходных каналов (нагрузок) при выключении питания.
- 128 виртуальных таймеров общего назначения (до 99 часов с точностью 1 сек.) и 128 флагов. Формирование событий по окончанию счета таймеров.
- Работа в качестве независимого устройства с управлением от внешнего контроллера по сети Ethernet.
- Работа в локальной сети TRIAnet по собственной программе, подготавливаемой инсталлятором и загружаемой в устройство как локально, так и дистанционно.
- Простая и открытая система команд управления по протоколу TCP/IP.
- Установка любого IP-адреса (мл. байт в диапазоне 10…250) и номера подсети (0, 1),
- Интерфейсная оболочка (Windows) для конфигурации каналов (входов и выходов) и для создания внутренней программы.
- Возможность управления всеми устройствами сети TRIAnet с мобильных устройств (iPhone, iPAD, Smartphone Android).
- Возможность беспрограммного автономного использования контроллера по нескольким стандартным сценариям.
- Возможность локального или дистанционного обновления внутренней прошивки контроллера, а также перепрограммирования его под нестандартные задачи пользователя*.
- Ведение электронного аппаратного журнала событий.
- Непрерывная самодиагностика аппаратных средств контроллера с индикацией факта неисправности.
- Самовосстановление после сбоев или пропадания питания с сохранением статусов всех выходных каналов и таймеров.
- Взаимный контроль работоспособности всех устройств системы с оповещением исправными контроллерами о неисправности других контроллеров.
Память
Очень популярной среди контроллеров автоматизации стала твердотельная память: не только в виде твердотельных накопителей (Solid-State Drive, SSD), но и съемных носителей, таких как карты CFast, а также инсталлированных на аппаратурном уровне устройств памяти с небольшой емкостью в более экономичных приложениях. Преимущества съемной памяти заключаются в том, что ее можно быстро заменить, на ней нетрудно создавать и хранить резервные копии файлов, а объем доступной памяти можно легко расширить.
Однако с использованием индустриальных карт памяти необходимо соблюдать предельную осторожность. Нужно обязательно убедиться в том, что спецификация на носитель соответствует требуемым техническим характеристикам для конкретного приложения
Различные типы памяти имеют разные сроки службы, которые зависят от условий и рабочей температуры среды, а также числа циклов чтения/записи
Это является важной темой для обсуждения с поставщиком средств автоматизации
Подбор контроллера по максимальной нагрузке, зарядному току акб и по количеству акб
Одним из важных аспектов выбора контроллера является максимальная выходная мощность контроллера, которая должна учитываться как со стороны контроллера, так и со стороны акб. Рассмотрим почему.
Допустим, имеем комплект акб большой емкости. Соответственно чтобы зарядить данные акб в течение дня, контроллер должен выдавать необходимую мощность, ну и мощность подключенных солнечных батарей должна быть, естественно, не меньшей. Если мощность контроллера и массива солнечных батарей будет меньше, то акб не успеют зарядиться в течение дня, и при постоянной нагрузке разрядятся еще больше, и так каждый раз, что скажется на их последующем ресурсе.
Если подключенные акб к солнечному контроллеру имеют маленькую емкость. Для современных контроллеров эта проблема уже не актуальна, но стоит рассмотреть такой вариант
На старых или простых контроллерах очень важно было подобрать контроллер, мощность которого с равной мощностью солнечных батарей позволят в течение дня зарядить акб, разряженный за ночь, и обеспечить питанием дневные электрические нагрузки. Для аккумуляторных батарей максимальный зарядный ток не должен превышать 30% от номинала емкости, если акб имеет емкость 100АЧ, то зарядный ток не должен превышать 30 Ампер
Если же мощность солнечной системы была бы избыточна, то контроллер продолжал бы заряжать акб даже после полного их заряда, не опуская зарядный ток и напряжение, что приводило к закипанию электролита, его кипению, вскипанию и порче аккумулятора. Современные контроллеры имеют встроенный компьютер, который следит за параметрами акб, имеет программу заряда, управляемые реле отключения, а также может регулировать ток и напряжение заряда.
Применение
ПЛК используются практически во всех сферах человеческой деятельности для автоматизации технологических процессов, в системах противоаварийной защиты и сигнализации, в станках с ЧПУ, для управления дорожным движением, в системах жизнеобеспечения зданий, для сбора и архивирования данных, в системах охраны, в медицинском оборудовании, для управления роботами, в системах связи, при постановке физического эксперимента, для управления космическими кораблями, для автоматизации испытаний продукции и т. д.
Наглядное представление сфер применения контроллеров:
На примере использования контроллера С2000-Т.
Принцип работы ПЛК

ПЛК работает по циклическому принципу. В самом начале цикла ПЛК сканирует состояния входов, на которые поступают сигналы от датчиков и устройств. Затем в соответствии с алгоритмом программы происходит вычисление состояния выходов. В конце рабочего цикла контроллер устанавливает каждый выход в состояние, которое было определено.
2. Выполнение программы пользователя
3. Запись состояний выходов
Указанные этапы цикла выполняются последовательно – это означает, что изменения состояний входов не будут «замечены» контроллером во время выполнения программы. По этой причине одним из важнейших параметров ПЛК является время реакции. Если оно окажется больше, чем минимальный период изменения состояний входов, некоторые события, происходящие в системе, будут «пропущены» контроллером.
Также стоит учесть, что и датчики реагируют на изменения в системе не мгновенно. Поэтому полное время реакции системы управления складывается из времени реакции ПЛК и времени реакции датчиков.
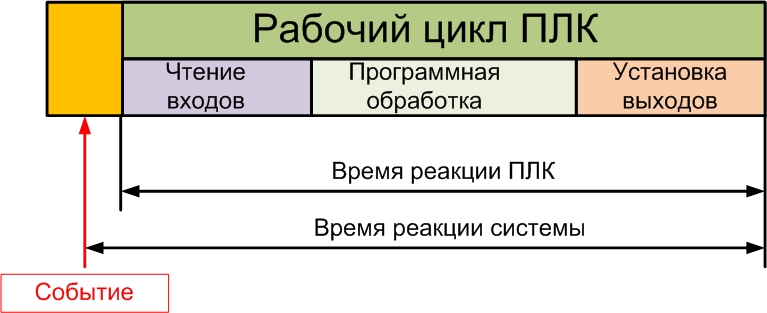
Время реакции системы — время с момента изменения состояния системы до момента выработки соответствующей реакции (принятия решения).
Технические характеристики
| Архитектура | Микроконтроллер | 16-bit PIC MCU |
| TCP/IP | W5100 (аппаратный стек протоколов связи) | |
| PHY (физ. уровень) | 10/100 Mбод Ethernet (дуплекс, полудуплекс) | |
| Последовательный порт | RS-485 (внутренняя локальная шина TRIAnet) 115200 бод. | |
| Энергонезависимая память | FRAM с бесконечным количеством циклов перезаписи (для хранения текущего состояния каналов) 2К | |
| FLASH-память | 4М (для хранения программы внутренней прошивки, программы пользователя и журнала со-бытий) | |
| Количество каналов коммутации | 32 | |
| Максимальный выходной ток | 2А | |
| Максимальный выходной ток в импульсе до 1 сек. | 6A | |
| Максимальное напряжение на входе | 24В (постоянного тока) | |
| Максимальное напряжение для нагрузок (реле), подключенных к выходу | 24В (постоянного тока) | |
| Поддерживаемые протоколы порта Ethernet | TCP (в режиме «сервер») для контроллера с TCP-модулем | |
| Системные таймера (точность 1 сек.) | 128 таймеров (до 99 часов каждый) | |
| Индикация | Светодиоды на разъеме Ethernet (Link и 10/100) Светодиоды «Operate», «Link», «Error» |
|
| Конструктивное исполнение и габаритные размеры | Модуль (9 DIN) для установки на din-рейку 15,9×9,0x6,0 см | |
| Напряжение питания | 12В (±20%) постоянного тока | |
| Потребляемая мощность | 2 Вт без нагрузок | |
| Температура | Работа: 0°С ~ 70°С, Хранение: -40°С ~ 85°С |
|
| Влажность | 10~80% |
Виды контроллеров
Разделение данных приспособлений происходит по нескольким критериям.
По типу обратной связи:
1. Для работы с датчиками Холла.
2. Без них.
3. Универсальные контроллеры. Они совмещают в себе первый и второй пункты.
По типу выходного сигнала:
1. Прямоугольная форма (меандр). Подобные гаджеты применяются на более дешёвых моделях электровелосипедов, да и сами недорогие. Они дают возможность пользователю получить большую скорость вращения, но в то же время, это ведёт к повышению шумности работы электродвигателя. А шумит движок по причине возникновения микровибрации обмоток под действием сигнала такой формы.
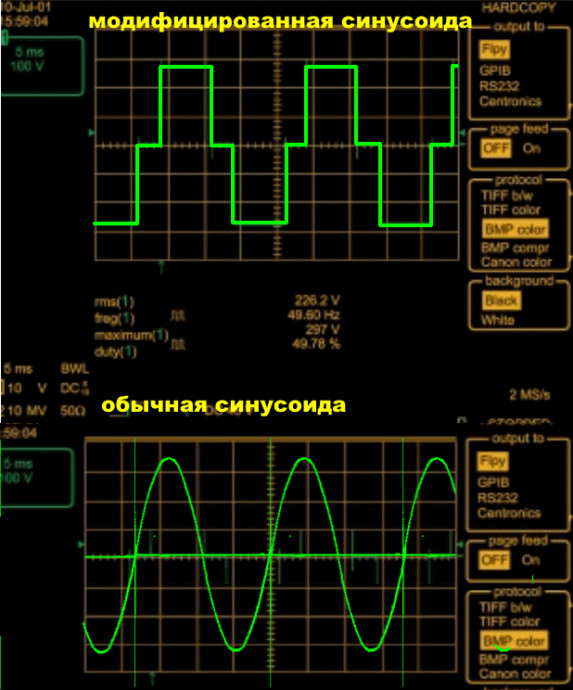
2. Сигнал в виде синусоиды. Скорость вращения меньше, зато и звук вращения электромотора полностью отсутствует.
3. Имеет место и промежуточное исполнение — «модифицированная синусоида». Эту вариацию можно назвать «сглаженный меандр». Однако такая разновидность не возымела популярности у юзеров.
Контроллеры могут иметь разную реакцию на сигналы поступающие от рукояти акселератора: в одном случае вы будете регулировать скорость, в другом — мощность или тягу движка.
Логика управления
Потребность в логическом управлении является фундаментальной, поэтому мы продолжаем называть контроллеры автоматизации PLC. Организация PLCopen поддерживает и расширяет сферу применения стандарта программирования IEC 61131-3 и управляет большой информационной базой в этой области, обучением и программными библиотеками. Деятельность группы выходит далеко за рамки простой логики и включает управление движением, безопасность, унифицированную архитектуру OPC (UA), спецификацию (определяющую передачу данных и взаимодействие устройств в промышленных сетях), расширяемый язык разметки XML и многое другое.
Подключение элементов к ПЛК
Во всех моделях контроллеров есть клеммы для подключения питания – некоторые нуждаются в переменном напряжении вплоть до 120 В, а другие — в постоянном до 24 В. Напряжение питания зависит от модели устройства. Входные клеммы обозначаются буквой Х – на каждую подается отдельный сигнал. Общий провод обычно соединяется с нейтралью источника переменного тока или с минусом постоянного.
В корпусе контроллера есть оптический изолятор – простой светодиод. С его помощью происходит связь входной клеммы и общей. При подаче напряжения на ПЛК загорается светодиод – именно по нему можно судить о том, что устройство работает. На выходе происходит генерация сигнала при помощи компьютерной схемотехники – активируется устройство переключения. В качестве переключающего устройства могут использоваться электромагнитные реле, транзисторы, силовые ключи, тиристоры. Выходы обозначаются буквой Y. На каждом выходе устанавливается светодиод, сигнализирующий о том, что устройство работает.
Входы и выходы контроллера для подключения устройств
- Нижний ряд разъемов (входы каналов) предназначен для подключения управляющих устройств инженерного оборудования (кнопок, выключателей, датчиков и др.).
- Верхний ряд разъемов (выходы каналов) предназначен для подключения управляемых устройств (реле, приводы и др.) инженерных систем.
- Разъем питания «+» «-» 12 В (±20%) постоянного тока. Ошибка в полярности не приводит к повреждению устройства.
- Клеммы A и B в верхнем ряду предназначены для подключения устройства к локальной шине TRIAnet.
- Клеммы терминатора локальной шины для установки перемычек на крайних устройствах, соединенных шлейфом.
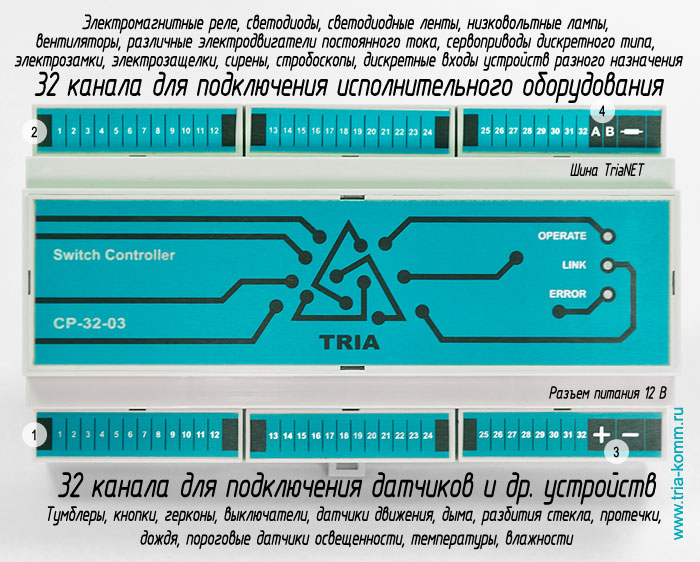 Назначение входов и выходов контроллера TK CP-32-03 для подключения различных устройств и оборудования
Назначение входов и выходов контроллера TK CP-32-03 для подключения различных устройств и оборудования
Контроллер TK CP-32-03 имеет 32 выходных канала коммутации низковольтных нагрузок (например, реле) и 32 входных канала, каждый из которых содержит интерфейсные схемы для подключения кнопок, герконов, датчиков протечки воды различных типов, датчиков движения, дождя, дыма и др., имеющих потенциал на коммутируемом выходе не более 24 В или «сухие» контакты. Четыре независимых таймера в каждом канале (всего 128) позволяют управлять автоматическим включением/выключением каналов без внешних команд. Четыре битовых флага на каждом канале могут быть использованы для временных запретов управления или хранения каких-либо особых состояний системы. Связь с центральным контроллером (AMX, CRESTRON и др.) при его наличии осуществляется по интерфейсу Ethernet (протокол связи TCP/IP) через Hub или Router.
Кулачковые контроллеры
На рисунке ниже изображен поперечный разрез кулачкового контроллера переменного тока:
Перекатывающийся
линейный контакт используется в контроллере. Относительно центра О2
может вращаться сменный подвижной контакт 1. Центр О2 расположен на
контактном рычаге 2. Контакт соединяется с помощью гибкой связи 4 с выходным
зажимом.
Необходимое нажатие и замыкание контактов создается пружиной 5, которая воздействует на контактный рычаг через шток 6. При размыкании контактов кулачок 7 действует на ролик 8. При этом пружина 5 сжимается, а контакты 1 и 3 размыкаются. От профиля кулачковой шайбы 9, приводящей контактные элементы в действие, будет зависеть момент включения и отключения контактов. Дуга, возникающая в момент переключения, не воздействует на контакты благодаря их перекатыванию. Малый износ контактов позволяет увеличить число включений в час до 600 при ПВ = 60%. По обе стороны кулачковой шайбы 9 расположены контактные элементы Ⅰ и Ⅱ, что позволяет резко снизить осевую длину контроллера. Как правило, вдоль оси аппарата располагается несколько контактных элементов, аналогичных рассмотренным. У кулачкового контроллера присутствует механизм фиксации положения вала, такой же, как и в барабанного. В виду облегчения гашения дуги на переменном токе кулачковыми элементами устанавливаются только дугостойкие асбестоцементные перегородки 10, препятствующие перекрытию между полюсами аппарата. В таких случаях установка дугогасительных устройств не обязательна. Если же контроллер отключает цепь постоянного тока, устанавливается дугогасительное устройство, аналогичное применяемому в контакторах.
Рассмотренная нами
конструкция контроллера имеет следующую особенность – включение происходит за
счет силы пружины, а выключение за счет выступа кулачка. Благодаря такой
конструкции контакты удается развести в случае их сваривания. Недостатком
применения такой системы является большой момент на валу, создаваемый включающими пружинами при значительном числе
контактных элементов.
Возможны также и другие
конструктивные выполнения контактов. В одном из них контакты размыкаются под
действием пружины, а замыкаются под действием кулачка. В другом случае
включение и отключение может происходить при помощи кулачков. Однако такие
решения применяются редко.
На рисунке ниже изображена схема пуска асинхронного электродвигателя с фазным ротором при помощи кулачкового контроллера.
Арабскими цифрами обозначены позиции вала аппарата, а римскими – контакты. При пуске «вперед» в работу вступают расположенные справа контактные элементы. Для примера рассмотрим позицию 3. В данной позиции замкнуты контакты Ⅰ, Ⅱ, Ⅲ, Ⅳ. При таком расположении контактов статор машины подключен к сети, а в роторе выведены первые позиции ступеней пусковых резисторов в двух фазах. В положении 5 все контакты замкнуты – ротор электродвигателя полностью закорочен.
Возможно, вам также будет интересно
SIMATIC S7-300 — это модульный программируемый контроллер, предназначенный для построения систем автоматизации низкой и средней степени сложности. Модульная конструкция, работа с естественным охлаждением, возможность применения структур локального и распределенного ввода-вывода, широкие коммуникационные возможности, множество функций, поддерживаемых на уровне операционной системы, удобство эксплуатации и обслуживания обеспечивают возможность получения рентабельных решений для построения систем автоматического управления в различных областях промышленного производства. Эффективному применению …
На железных дорогах мира широкое распространение получили напольные системы бесконтактного контроля перегретых букс, т. н. детекторы горячих букс (Hot Box Detector, HBD) с использованием приемников ИК излучения. Детекторы нагретых букс устанавливаются на путях с интервалом 25-40 км и служат для обнаружения перегретых букс на ходу поезда. В статье предложена реализация автоматизированной системы…
Для высокопроизводительных вычислительных систем, ориентированных на обработку и хранение больших объемов информации, компания Toshiba предлагает жесткие диски семейства Enterprise Capacity. Старшими представителями этой серии в настоящее время являются модели с информационным объемом 14 Тбайт.
Конструкция рукоятей
Начать стоит с главного рычага, который, естественно, соединен с главным валом. Этот рычаг позволяет управлять тяговыми двигателями в соответствующем режиме и при этом имеет 37 позиций, не считая нулевой.
Далее следует обратить внимание на тормозную рукоять, которая соединяется с тормозным валом. Если двигать рычаг по часовой стрелке, то позиции контроллера машиниста в этом случае ограничиваются 15, не считая нулевой
Перемещение рукояти будет означать регулирование тока возбуждения в рекуперативном режиме. Данный рычаг можно вращать и против часовой стрелки. В этом случае у него будет всего 4 позиции, которые будут ослаблять возбуждение тяговых двигателей.
Для фиксации как главной, так и тормозной рукояти на одном месте может применяться защелка или же специальный выступ. Если говорить о защелке, то у нее имеется зуб, который перемещается в специальную прорезь из-за воздействия пружины. Для того чтобы сдвинуть рычаг с места, то есть переместить его в другую позицию, потребуется прижать к нему защелку, чтобы зубец вышел из паза. После этого рукоять можно передвинуть, защелка освобождается, и можно двигать рычаг до попадания в следующий паз.
Определение
Невозможно дать единого определения термина «контроллер», поскольку этим термином называют самые различные устройства. Если мы обратимся к Википедии, то в ней представлено несколько значений этого слова, среди которых следующие:
— контроллер прерываний (микросхема или встроенный блок процессора, отвечающий за возможность обработки запросов на прерывание от разных устройств);
— микроконтроллер (микросхема, управляющая электронными устройствами);
— контроллер электрического двигателя (многоступенчатый, многоцепной коммутационный аппарат с ручным управлением);
— промышленный контроллер (управляющее устройство, применяемое в промышленности и других отраслях для автоматизации технологических процессов);
— программируемый логический контроллер (ПЛК) (промышленный контроллер, предназначенный для выполнения логических операций, т.е. операций алгебры логики)
В данной статье будут рассматриваться контроллеры, применяемые в системах автоматизации, в частности программируемые логические контроллеры.
Контроллером в системах автоматизации называют устройство, выполняющее управление физическими процессами по записанному в него алгоритму, с использованием информации, получаемой от датчиков и выводимой в исполнительные устройства.
Программируемый логический контроллер — это микропроцессорное устройство, предназначенное для управления технологическими процессами в промышленности и другими сложными технологическими объектами (например, системы управления микроклиматом). Принцип работы ПЛК заключается в сборе сигналов от датчиков и их обработке по прикладной программе пользователя с выдачей управляющих сигналов на исполнительные устройства.
Типы контроллеров
Компания Сименс предлагает насколько вариантов таких устройств, каждый из них предназначен для работы в определенной системе
Программируемые контроллеры или модули Siemens LOGO. Серия Лого – это хорошая поддержка и качество прибора по доступной цене. Благодаря его специально разработанному процессору, можно выполнять команды средней сложности и при этом не занимать больших площадей. Из 8 основных логических функций и 30/35 специальных функций, LOGO! Логический модуль, может заменить большое количество обычных коммутационных и управляющих устройств.
Положительные качества:
- Быстрый монтаж;
- Стоят недорого;
- Небольшие размеры.
Используя ПИД Siemens LOGO, можно добиться следующих результатов: свободно настроить таймеры приборов, проработать уровни принимаемых сигналов и их качество, проверить корректность работы приборов, зафиксировать все данные про работу, подключить прибор к трехфазной сети при помощи специального коммутатора Сименс, настроить монитор на отображение уровня получаемых сигналов, сэкономить на использовании других контроллеров, типа ПК и т.д
Оптимальный контроллер для каждой задачи — ПЛК на основе ПК.
Контроллер siemens s7-200 simatic применяется в качестве логических модулей для решения простых задач управления, подключения к классическим модульным ПЛК, контроля приборов на базе ПЛК к которому его подключают, даже в экстремальных условиях.
Есть SIMATIC контроллеры для решения небольших задач автоматизации, и для очень сложных программных процессов. Их главными преимуществами является отличное качество и быстрая наладка, а также возможность подключаться к уже настроенному модулю. Достоинства серии Сименс Стигматик:
- Полный набор математических функций;
- При помощи модернизируемых микромодулей, которые подключаются к прибору, есть возможность настройки и перенастройки не только на разные частоты управления, но и направления в целом (к примеру, переналадка станков или небольших установок);
- Доступна коммутация с такими сетями, как Industrial Ethernet/Internet, AS Interface, MODBUS и слайв;
- Контроль систему АСУ и АСУ ТП;
- Благодаря наличию встроенного интерфейса, есть возможность установки связи напрямую с другими контроллерами;
- При необходимости передача сигналов на GSM-устройство;
- Уникальная функция фиксации и хранения определенное количество времени данных;
- В основном эти контроллеры серии Siemens применяется для вентиляции и отопления, контроля электроэнергии и среднемощных установок;
Контроллер Сименс RLU220 для вентиляции - Хост полностью настраиваемый, не нужно специальное бучение для работы за устройством;
- Программирование производится своими руками, при использовании простого и достаточно доступного обеспечения типа Виндовс.
Siemens контроллеры s7-300 и s7-1200 simatic – это технические устройства высшего уровня. Их применение необходимо при отладке и контроле производственного процесса на высокоточном оборудовании, шлифовальных станках на программном управлении, роботов, лазеров, регулирование асинхронных двигателей и прочего.

Основные достоинства:
- Существует широкий выбор вариантов, оптимально подходящих по стоимости и качеству;
- Можно полностью перенастроить прибор, модернизировать его, добавить новые функции при помощи дополнительного модуля либо форматировать часть программного обеспечения для ускорения процесса загрузки;
- Работа прибора не зависит от температуры;
- Достаточно широкие характеристики наладки подключения к прочим периферийным механизмам. Это Профинет Профибус и omron;
- Дискретные модульные программы типа SM321, SM322, SM323, SM32 и аналоговыеSM331, SM332, SM334, ES335, сигналы позволяют подключаться контроллеру к всевозможным датчикам и фиксировать улавливаемое действие со стороны дополнительных модулей;
- Очень простой процесс настройки и перенастройки, при помощи специального уравнения, которое вводится в систему;
- Продолжительный срок эксплуатации, подробное руководство пользователя;
- Недостатки – высокая цена.
Перед покупкой обязательно проверяется вся документация: это паспорт, сертификат. Часто контроллеры Siemens в России продаются из контрабандных источников, поэтому внимательно читайте описание.
Стоимость контроллеров – несколько тысяч рублей, в зависимости от их марки. Официальные представители компании Сименс (есть в Москве, Днепропетровске, Донецке, Одессе, Харькове и др.) часто делают скидки на продукцию, работает система лояльности, посетите центры обслуживания клиентов – и Вы получите исчерпывающие ответы на эти вопросы.
СЕТЕВЫЕ КОНТРОЛЛЕРЫ СКУД
Само название подразумевает что они могут объединяться в сеть и работать под общим управлением.
Традиционно сетевыми называют контроллеры, осуществляющие обмен по интерфейсу RS-485. Они совместимы, как правило, с оборудованием и программным обеспечением одного производителя: Болид, Parsec и пр.
Существуют устройства имеющие встроенный Web-сервер и интерфейсы Ethernet. Их возможности, естественно, шире и их по праву можно называть IP контроллерами.
Сетевые исполнения могут также работать и в автономном режиме, причем их возможности шире. Например, возможно задание временных окон для разных групп пользователей, то есть кто то сможет проходить круглосуточно, а кто то только в рабочее время.
Но большинство опций реализуется при работе в сети под управлением центрального сервера системы. Рассмотрим основные достоинства такого варианта.
1. Создание единой базы пользователей системы контроля доступа с множеством дополнительных идентификаторов: от табельного номера до фотографии.
2. Централизованное задание уровней (прав) доступа.
3. Контроль за перемещением любого пользователя, в том числе учет рабочего времени.
4. Возможность работы в составе системы интегрированной безопасности. Это дает много дополнительных возможностей, но главное является возможность автоматического разблокирования дверей при пожаре. Естественно, для этого нужно объединить СКУД с системой пожарной сигнализации.
Не менее интересно, но реже используется использование контроллеров в качестве приборов охранной сигнализации. По большому счету полезных возможностей от применения сетевых устройств много.
Но здесь есть одно «но», о чем я уже писал: стремясь предусмотреть все разработчики и производители создают прибор с таким функционалом, разобраться в котором проблематично даже опытному инсталлятору.
Кстати, совместимость интерфейсов со считывателем актуальная и для сетевых контроллеров, за исключением случаев совмещенного исполнения этих двух устройств.
С одной стороны это достаточно удобно, с другой – контроллер скуд со встроенным считывателем обслуживает только одну точку прохода, причем в одном направлении. Кнопку «выход» к нему подключить, конечно, можно, но контроль все равно будет осуществляться в одну сторону.
Питание контроллеров осуществляется по отдельной линии, в случае IP исполнений возможно использование технологии РоЕ. Установку лучше производить в недоступном для посторонних месте для предотвращения возможности несанкционированного доступа и саботажа работы системы.
* * *
2014-2021 г.г. Все права защищены.Материалы сайта имеют ознакомительный характер и не могут использоваться в качестве руководящих и нормативных документов.